#include <collisionSolid.h>
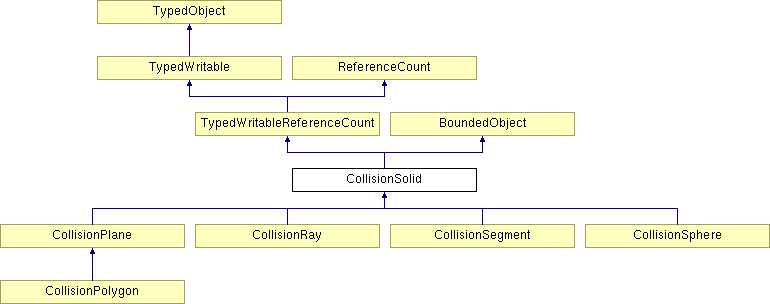
Inheritance diagram for CollisionSolid:
Public Types | |
| enum | BoundingVolumeType { BVT_static, BVT_dynamic_sphere } |
Public Member Functions | |
| CollisionSolid () | |
| CollisionSolid (const CollisionSolid ©) | |
| virtual | ~CollisionSolid () |
| virtual CollisionSolid * | make_copy ()=0 |
| virtual LPoint3f | get_collision_origin () const=0 |
| void | set_tangible (bool tangible) |
| Sets the current state of the 'tangible' flag. | |
| bool | is_tangible () const |
| Returns whether the solid is considered 'tangible' or not. | |
| virtual PointerTo< CollisionEntry > | test_intersection (const CollisionEntry &entry) const |
| Tests for a collision between this object (which is also the "from" object in the entry) and the "into" object. | |
| virtual void | xform (const LMatrix4f &mat)=0 |
| GeomNode * | get_viz () const |
| Returns a GeomNode that may be rendered to visualize the CollisionSolid. | |
| virtual void | output (ostream &out) const |
| virtual void | write (ostream &out, int indent_level=0) const |
| virtual void | write_datagram (BamWriter *manager, Datagram &me) |
| Function to write the important information in the particular object to a Datagram. | |
| virtual TypeHandle | get_type () const |
| virtual TypeHandle | force_init_type () |
| virtual int | complete_pointers (TypedWritable **p_list, BamReader *manager) |
| Receives an array of pointers, one for each time manager->read_pointer() was called in fillin(). | |
| virtual void | finalize () |
| Called by the BamReader to perform any final actions needed for setting up the object after all objects have been read and all pointers have been completed. | |
| int | get_type_index () const |
| Returns the internal index number associated with this object's TypeHandle, a unique number for each different type. | |
| bool | is_of_type (TypeHandle handle) const |
| Returns true if the current object is or derives from the indicated type. | |
| bool | is_exact_type (TypeHandle handle) const |
| Returns true if the current object is the indicated type exactly. | |
| int | get_ref_count () const |
| Returns the current reference count. | |
| int | ref () const |
| Explicitly increments the reference count. | |
| int | unref () const |
| Explicitly decrements the reference count. | |
| void | test_ref_count_integrity () const |
| Does some easy checks to make sure that the reference count isn't completely bogus. | |
| void | set_bound (BoundingVolumeType type) |
| Sets the type of the bounding volume that will be dynamically computed for this particular node. | |
| void | set_bound (const BoundingVolume &volume) |
| Explicitly sets a new bounding volume on this node. | |
| const BoundingVolume & | get_bound () const |
| Returns the current bounding volume on this node, possibly forcing a recompute. | |
| bool | mark_bound_stale () |
| Marks the current bounding volume as stale, so that it will be recomputed later. | |
| void | force_bound_stale () |
| Marks the current volume as stale and propagates the effect at least one level, even if it had already been marked stale. | |
| bool | is_bound_stale () const |
| Returns true if the bound is currently marked stale and will be recomputed the next time get_bound() is called. | |
| void | set_final (bool flag) |
| Sets the "final" flag on this BoundedObject. | |
| bool | is_final () const |
| Returns the current state of the "final" flag. | |
Static Public Member Functions | |
| TypeHandle | get_class_type () |
| void | init_type () |
Static Public Attributes | |
| TypedWritable *const | Null = (TypedWritable*)0L |
Protected Member Functions | |
| virtual PointerTo< CollisionEntry > | test_intersection_from_sphere (const CollisionEntry &entry) const |
| This is part of the double-dispatch implementation of test_intersection(). | |
| virtual PointerTo< CollisionEntry > | test_intersection_from_ray (const CollisionEntry &entry) const |
| This is part of the double-dispatch implementation of test_intersection(). | |
| virtual PointerTo< CollisionEntry > | test_intersection_from_segment (const CollisionEntry &entry) const |
| This is part of the double-dispatch implementation of test_intersection(). | |
| void | mark_viz_stale () |
| Called internally when the visualization may have been compromised by some change to internal state and will need to be recomputed the next time it is rendered. | |
| virtual void | fill_viz_geom () |
| Fills the _viz_geom GeomNode up with Geoms suitable for rendering this solid. | |
| ConstPointerTo< RenderState > | get_solid_viz_state () |
| Returns a RenderState for rendering collision visualizations in solid. | |
| ConstPointerTo< RenderState > | get_wireframe_viz_state () |
| Returns a RenderState for rendering collision visualizations in wireframe. | |
| ConstPointerTo< RenderState > | get_other_viz_state () |
| Returns a RenderState for rendering collision visualizations for things that are neither solid nor exactly wireframe, like rays and segments. | |
| void | fillin (DatagramIterator &scan, BamReader *manager) |
| Function that reads out of the datagram (or asks manager to read) all of the data that is needed to re-create this object and stores it in the appropiate place. | |
| virtual void | propagate_stale_bound () |
| Called by BoundedObject::mark_bound_stale(), this should make sure that all bounding volumes that depend on this one are marked stale also. | |
| virtual BoundingVolume * | recompute_bound () |
| Recomputes the dynamic bounding volume for this object. | |
| const BoundingVolume * | get_bound_ptr () const |
| Returns the state of the _bound pointer. | |
| BoundingVolume * | set_bound_ptr (BoundingVolume *bound) |
| Changes the _bound pointer. | |
Static Protected Member Functions | |
| void | report_undefined_intersection_test (TypeHandle from_type, TypeHandle into_type) |
| Outputs a message the first time an intersection test is attempted that isn't defined, and explains a bit about what it means. | |
| void | report_undefined_from_intersection (TypeHandle from_type) |
| Outputs a message the first time an intersection test is attempted that isn't defined, and explains a bit about what it means. | |
Protected Attributes | |
| PointerTo< GeomNode > | _viz_geom |
| bool | _viz_geom_stale |
| bool | _tangible |
Static Private Attributes | |
| TypeHandle | _type_handle |
Friends | |
| class | CollisionSphere |
| class | CollisionRay |
| class | CollisionSegment |
This class and its derivatives really work very similarly to the way BoundingVolume and all of its derivatives work. There's a different subclass for each basic shape of solid, and double-dispatch function calls handle the subset of the N*N intersection tests that we care about.
Definition at line 65 of file collisionSolid.h.
|
|
Definition at line 58 of file boundedObject.h. |
|
|
Definition at line 50 of file collisionSolid.cxx. References _viz_geom_stale. |
|
|
Definition at line 63 of file collisionSolid.cxx. |
|
|
Definition at line 78 of file collisionSolid.cxx. References get_type(), NULL, and report_undefined_from_intersection(). |
|
||||||||||||
|
Receives an array of pointers, one for each time manager->read_pointer() was called in fillin(). Returns the number of pointers processed. This is the callback function that is made by the BamReader at some later point, after all of the required pointers have been filled in. It is necessary because there might be forward references in a bam file; when we call read_pointer() in fillin(), the object may not have been read from the file yet, so we do not have a pointer available at that time. Thus, instead of returning a pointer, read_pointer() simply reserves a later callback. This function provides that callback. The calling object is responsible for keeping track of the number of times it called read_pointer() and extracting the same number of pointers out of the supplied vector, and storing them appropriately within the object. Reimplemented in AnimBundleNode, AnimGroup, PartBundleNode, PartGroup, Character, CharacterJoint, CollisionNode, GeomSprite, PiecewiseCurve, ClipPlaneAttrib, FogAttrib, LensNode, LightAttrib, MaterialAttrib, RenderEffects, RenderState, TextureAttrib, Person, and Child. Definition at line 94 of file typedWritable.cxx. Referenced by RenderState::do_invert_compose(). |
|
|
Fills the _viz_geom GeomNode up with Geoms suitable for rendering this solid.
Reimplemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. Definition at line 341 of file collisionSolid.cxx. |
|
||||||||||||
|
Function that reads out of the datagram (or asks manager to read) all of the data that is needed to re-create this object and stores it in the appropiate place.
Reimplemented from TypedWritable. Reimplemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. Definition at line 324 of file collisionSolid.cxx. References CPT, CullFaceAttrib::M_cull_none, TransparencyAttrib::M_none, RenderModeAttrib::M_wireframe, TransparencyAttrib::make(), RenderModeAttrib::make(), CullFaceAttrib::make(), RenderState::make(), and NULL. Referenced by CollisionSegment::register_with_read_factory(), and CollisionRay::register_with_read_factory(). |
|
|
Called by the BamReader to perform any final actions needed for setting up the object after all objects have been read and all pointers have been completed.
Reimplemented in PartBundle, RenderAttrib, RenderEffect, RenderEffects, RenderState, and TransformState. Definition at line 112 of file typedWritable.cxx. Referenced by BamReader::skip_pointer(). |
|
|
Marks the current volume as stale and propagates the effect at least one level, even if it had already been marked stale.
Definition at line 188 of file boundedObject.I. References BoundedObject::_cycler, BoundedObject::F_final, and INLINE. Referenced by PandaNode::remove_child(). |
|
|
Reimplemented from TypedWritableReferenceCount. Reimplemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. Definition at line 134 of file collisionSolid.h. |
|
|
Returns the current bounding volume on this node, possibly forcing a recompute. A node's bounding volume encloses only the node itself, irrespective of the nodes above or below it in the graph. This is different from the bounding volumes on the arcs, which enclose all geometry below them. Reimplemented in PandaNode. Definition at line 59 of file boundedObject.cxx. Referenced by PandaNode::clear_effect(), PandaNode::get_state(), and CollisionLevelState::reserve(). |
|
|
Returns the state of the _bound pointer. To be used only internally by derived classes. This returns a const pointer only; the bounding volume should not be modified directly, because that might interfere with pipelining. Instead, create a new copy with make_copy(), modify the copy, and set_bound_ptr() with the copy. Alternatively, if you have just called recompute_bound(), which is guaranteed to reset the pointer, just use the return value from that as a non-const BoundingVolume pointer. Definition at line 318 of file boundedObject.I. |
|
|
Reimplemented from BoundedObject. Reimplemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. Definition at line 121 of file collisionSolid.h. Referenced by CollisionPlane::init_type(). |
|
|
Implemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. |
|
|
Returns a RenderState for rendering collision visualizations for things that are neither solid nor exactly wireframe, like rays and segments.
Definition at line 447 of file collisionSolid.cxx. |
|
|
Returns the current reference count.
Definition at line 183 of file referenceCount.I. Referenced by RenderState::determine_bin_index(), RenderEffects::determine_show_bounds(), FontPool::ns_garbage_collect(), TexturePool::ns_garbage_collect(), MaterialPool::ns_get_material(), and TexturePool::ns_release_texture(). |
|
|
Returns a RenderState for rendering collision visualizations in solid. This automatically returns the appropriate state according to the setting of _tangible. Definition at line 359 of file collisionSolid.cxx. References CPT, TransparencyAttrib::M_alpha, CullFaceAttrib::M_cull_clockwise, RenderModeAttrib::M_filled, TransparencyAttrib::make(), RenderModeAttrib::make(), CullFaceAttrib::make(), RenderState::make(), and NULL. Referenced by CollisionPolygon::test_intersection_from_segment(). |
|
|
Reimplemented from TypedWritableReferenceCount. Reimplemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. Definition at line 131 of file collisionSolid.h. Referenced by write(), and ~CollisionSolid(). |
|
|
Returns the internal index number associated with this object's TypeHandle, a unique number for each different type. This is equivalent to get_type().get_index(). Definition at line 71 of file typedObject.I. References TypeHandle::get_name(), TypedObject::get_type(), and INLINE. |
|
|
Returns a GeomNode that may be rendered to visualize the CollisionSolid. This is used during the cull traversal to render the CollisionNodes that have been made visible. Definition at line 118 of file collisionSolid.cxx. References indent(). Referenced by CollisionNode::combine_with(). |
|
|
Returns a RenderState for rendering collision visualizations in wireframe. This automatically returns the appropriate state according to the setting of _tangible. Definition at line 404 of file collisionSolid.cxx. Referenced by CollisionPolygon::test_intersection_from_segment(). |
|
|
Reimplemented from BoundedObject. Reimplemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. Definition at line 124 of file collisionSolid.h. |
|
|
Returns true if the bound is currently marked stale and will be recomputed the next time get_bound() is called. This function is defined up at the top of this file, because several of the inline functions below reference it. Definition at line 217 of file boundedObject.I. References BoundedObject::_cycler, and INLINE. Referenced by BoundedObject::~BoundedObject(). |
|
|
Returns true if the current object is the indicated type exactly.
Definition at line 101 of file typedObject.I. Referenced by PT(), and CollisionNode::xform(). |
|
|
Returns the current state of the "final" flag. Initially, this flag is off (false), but it may be changed by an explicit call to set_final(). See set_final(). Definition at line 280 of file boundedObject.I. |
|
|
|
Returns whether the solid is considered 'tangible' or not. An intangible solid has no effect in a CollisionHandlerPusher (except to throw an event); it's useful for defining 'trigger' planes and spheres, that cause an effect when passed through. Definition at line 66 of file collisionSolid.I. |
|
|
Implemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. |
|
|
Marks the current bounding volume as stale, so that it will be recomputed later. This may have a cascading effect up to the root of all graphs of which the node is a part. Returns true if the setting was changed, or false if it was already marked stale (or if it is a static bounding volume). Definition at line 162 of file boundedObject.I. References BoundedObject::_cycler, BoundedObject::F_bound_stale, and INLINE. Referenced by CollisionSphere::CollisionSphere(), GeomNode::combine_with(), CollisionPlane::get_normal(), PGItem::instance_to_state_def(), CollisionPlane::make_copy(), PGItem::set_active(), CollisionSphere::set_center(), TextNode::set_coordinate_system(), PandaNode::set_effect(), CollisionNode::set_from_collide_mask(), GeomNode::set_geom_state(), CollisionRay::set_origin(), CollisionSegment::set_point_a(), CollisionSphere::test_intersection(), CollisionSegment::test_intersection(), CollisionRay::test_intersection(), and CollisionNode::xform(). |
|
|
Called internally when the visualization may have been compromised by some change to internal state and will need to be recomputed the next time it is rendered.
Definition at line 85 of file collisionSolid.I. Referenced by CollisionSphere::CollisionSphere(), CollisionPlane::get_normal(), CollisionPlane::make_copy(), CollisionSphere::set_center(), CollisionRay::set_origin(), CollisionSegment::set_point_a(), CollisionSphere::test_intersection(), CollisionSegment::test_intersection(), and CollisionRay::test_intersection(). |
|
|
Reimplemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. Definition at line 139 of file collisionSolid.cxx. References NULL. |
|
|
Called by BoundedObject::mark_bound_stale(), this should make sure that all bounding volumes that depend on this one are marked stale also.
Reimplemented in dDrawable, and PandaNode. Definition at line 108 of file boundedObject.cxx. |
|
|
Recomputes the dynamic bounding volume for this object. The default behavior is the compute an empty bounding volume; this may be overridden to extend it to create a nonempty bounding volume. However, after calling this function, it is guaranteed that the _bound pointer will not be shared with any other stage of the pipeline, and this new pointer is returned. Reimplemented in CollisionNode, CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, CollisionSphere, Geom, and PandaNode. Definition at line 134 of file boundedObject.cxx. Referenced by CollisionSphere::get_collision_origin(). |
|
|
Explicitly increments the reference count. User code should avoid using ref() and unref() directly, which can result in missed reference counts. Instead, let a PointerTo object manage the reference counting automatically. This function is const, even though it changes the object, because generally fiddling with an object's reference count isn't considered part of fiddling with the object. An object might be const in other ways, but we still need to accurately count the number of references to it. The return value is the new reference count. Definition at line 225 of file referenceCount.I. Referenced by ClientDevice::ClientDevice(), EggGroupNode::find_textures(), EggGroupNode::r_apply_texmats(), EggGroupNode::r_flatten_transforms(), and EggGroupNode::reverse_vertex_ordering(). |
|
|
Outputs a message the first time an intersection test is attempted that isn't defined, and explains a bit about what it means.
Definition at line 276 of file collisionSolid.cxx. Referenced by ~CollisionSolid(). |
|
||||||||||||
|
Outputs a message the first time an intersection test is attempted that isn't defined, and explains a bit about what it means.
Definition at line 243 of file collisionSolid.cxx. References _tangible, and Datagram::add_uint8(). Referenced by write(). |
|
|
Explicitly sets a new bounding volume on this node. This will be a static bounding volume that will no longer be recomputed automatically. Reimplemented in PandaNode. Definition at line 135 of file boundedObject.I. References BoundedObject::F_bound_stale. |
|
|
Sets the type of the bounding volume that will be dynamically computed for this particular node. Presently, this should only be BVT_dynamic_sphere. Definition at line 115 of file boundedObject.I. |
|
|
Changes the _bound pointer. To be used only internally by derived classes, usually in recompute_bound(). The return value is the same pointer passed in, as a convenience (it will now be reference counted). Definition at line 340 of file boundedObject.I. |
|
|
Sets the "final" flag on this BoundedObject. If this is true, than no bounding volume need be tested below it; a positive intersection with this bounding volume is deemed to be a positive intersection with all geometry inside. This is useful to quickly force a larger bounding volume around a node when the GeomNodes themselves are inaccurate for some reason, without forcing a recompute of every nested bounding volume. It's also helpful when the bounding volume is tricked by some special properties, like billboards, that may move geometry out of its bounding volume otherwise. Definition at line 256 of file boundedObject.I. |
|
|
Sets the current state of the 'tangible' flag. Set this true to make the solid tangible, so that a CollisionHandlerPusher will not allow another object to intersect it, or false to make it intangible, so that a CollisionHandlerPusher will ignore it except to throw an event. Definition at line 42 of file collisionSolid.I. References _tangible, and INLINE. Referenced by EggLoader::make_collision_sphere(). |
|
|
Tests for a collision between this object (which is also the "from" object in the entry) and the "into" object. If a collision is detected, returns a new CollisionEntry object that records the collision; otherwise, returns NULL. Reimplemented in CollisionRay, CollisionSegment, and CollisionSphere. Definition at line 98 of file collisionSolid.cxx. References _viz_geom, and NULL. Referenced by CollisionEntry::set_from_surface_normal(). |
|
|
This is part of the double-dispatch implementation of test_intersection(). It is called when the "from" object is a ray. Reimplemented in CollisionPlane, CollisionPolygon, and CollisionSphere. Definition at line 187 of file collisionSolid.cxx. Referenced by CollisionRay::make_copy(). |
|
|
This is part of the double-dispatch implementation of test_intersection(). It is called when the "from" object is a segment. Reimplemented in CollisionPolygon, and CollisionSphere. Definition at line 206 of file collisionSolid.cxx. Referenced by CollisionSegment::make_copy(). |
|
|
This is part of the double-dispatch implementation of test_intersection(). It is called when the "from" object is a sphere. Reimplemented in CollisionPlane, CollisionPolygon, and CollisionSphere. Definition at line 168 of file collisionSolid.cxx. References NULL. Referenced by CollisionSphere::make_copy(). |
|
|
Does some easy checks to make sure that the reference count isn't completely bogus.
Definition at line 328 of file referenceCount.I. References INLINE. Referenced by EggNode::determine_bin(), and ReferenceCount::~ReferenceCount(). |
|
|
Explicitly decrements the reference count. Note that the object will not be implicitly deleted by unref() simply because the reference count drops to zero. (Having a member function delete itself is problematic; plus, we don't have a virtual destructor anyway.) However, see the helper function unref_delete(). User code should avoid using ref() and unref() directly, which can result in missed reference counts. Instead, let a PointerTo object manage the reference counting automatically. This function is const, even though it changes the object, because generally fiddling with an object's reference count isn't considered part of fiddling with the object. An object might be const in other ways, but we still need to accurately count the number of references to it. The return value is the new reference count. Definition at line 293 of file referenceCount.I. References INLINE. Referenced by RenderState::determine_bin_index(), and RenderEffects::determine_show_bounds(). |
|
||||||||||||
|
Definition at line 151 of file collisionSolid.cxx. References CollisionRay::get_class_type(), get_type(), NULL, and report_undefined_intersection_test(). |
|
||||||||||||
|
Function to write the important information in the particular object to a Datagram.
Implements TypedWritableReferenceCount. Reimplemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. Definition at line 304 of file collisionSolid.cxx. Referenced by CollisionSegment::fill_viz_geom(). |
|
|
Implemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. |
|
|
Definition at line 140 of file collisionSolid.h. |
|
|
Definition at line 141 of file collisionSolid.h. |
|
|
Definition at line 139 of file collisionSolid.h. |
|
|
Definition at line 112 of file collisionSolid.h. Referenced by report_undefined_intersection_test(), and set_tangible(). |
|
|
Reimplemented from BoundedObject. Reimplemented in CollisionPlane, CollisionPolygon, CollisionRay, CollisionSegment, and CollisionSphere. Definition at line 40 of file collisionSolid.cxx. |
|
|
Definition at line 110 of file collisionSolid.h. Referenced by CollisionSegment::recompute_bound(), test_intersection(), and CollisionPolygon::test_intersection_from_segment(). |
|
|
Definition at line 111 of file collisionSolid.h. Referenced by CollisionSolid(). |
|
|
Definition at line 25 of file typedWritable.cxx. Referenced by Child::complete_pointers(), Parent::complete_pointers(), Person::complete_pointers(), LoaderFileTypeBam::get_extension(), PartGroup::pick_channel_index(), BamReader::read_pointer(), and AnimGroup::write_datagram(). |
 1.3
1.3